
 Search Here
Search Here
MISC
Parts List
Robot Forum
Chat
Member Pages
Axon MCU
Robot Books
Shop
Contact
SKILLS
How To Build
A Robot
Tutorial
Calculators
Mechanics
Programming
Miscellaneous
Robots
Space
HARDWARE
Actuators
Batteries
Electronics
Materials
Microcontrollers
Sensors
SCIENCE
Robot Journals
Robot Theory
Conferences
|
Introduction to Mechanical Engineering Theory, Energy
This tutorial will cover the practical applications of understanding energy with
respect to robots. I do not want to lecture you on high school physics, so I will
just go straight to the juicy stuff. What will make this tutorial very useful
is that you can simply use the laws of physics to determine the minimal amount
of energy your robot needs to perform any desired task (will help you select a battery).
A warning to those who don't like math - this tutorial has a lot of it. If you don't want to bother with the theory, feel free to simply skip to my Robot Energy Calculator.
potential energy (measured in joules) = mass (kg) * gravity (m/s^2) * height (m)
Now unless your robot is a rock, this at first appears to be useless math.
Now suppose your robot were to climb a cliff, how much energy will be drained
from your robot battery? Well, the energy your robot would need
would be equal to the potential energy at the top of the cliff.
Or suppose you had a robot helicopter and you wanted to determine the maximum altitude
it can go with a particular battery. Then you would simply reorder the equation slightly
and get this:
(note that this does not leave enough energy to survive the trip back down)
Lets say you have a typical wheeled robot running on perfectly flat zero friction loss terrain. In this
scenario, there are only two drains on energy - acceleration and deceleration. Both
can occur at any time, not just at stop and start locations, but also when turning and rotating.
So how do we calculate this? Simple, use the kinetic energy equation:
where velocity is the desired maximum velocity.
For example, lets say our 1kg robot starts at rest and accelerates to 1 m/s, rotates 90 degrees and then
travels at 2 m/s, then decelerates back to zero velocity. How much energy was spent?
Simplifing the above, it starts moving, stops to rotate, moves again, and then stops again. Or:
Notice that I multiplied by two - this is because the robot accelerated twice and decelerated twice.
The energy to start moving equals the energy to stop moving!
For example, lets suppose our wheeled robot is driving up a hill. In other words, your robot is
doing two things - going up, AND driving horizontal. If you calculate each separately,
you can then sum them up for total energy required.
Typically, these sources are too complex to mathematically calculate, and so we have two choices.
We build mockups/prototypes to test, or we just guess based on intuition.
If you are unable to create a mathematical model for your first design,
you must use intuition and guesswork. If you wish to build
'new and improved' designs, then you can experiment on your previous prototype.
Since you are reading this tutorial I am assuming you do not have a good intuition when
determining these energy losses so here is a quick guide:
For most robots air friction can be ignored. Only account for air friction when your robot
is very large (huge surface area), shaped like a parachute (you get the idea), or has a high velocity
(air friction is proportional to velocity). To otherwise mathematically model this would require
CFD, or computational fluid dynamics simulations.
Ground friction losses occur as distance is traveled. If your robot was operating on say rough terrain
and traveled a specific distance, your robot would need to constantly accelerate to counter the friction induced
deceleration.
For example,
deceleration_ratio = # of times to re-accelerate / unit_distance
A perfectly designed system in an ideal environment would yield a deceleration ratio of 0.
A ratio of 1 would be realistic, and even higher would represent high friction in your system.
Gearing losses are much easier to calculate.
Check out my gearing efficiency tutorial.
If your robot does not use a thermal form of energy (like a combustion engine), then
you can ignore thermal losses as they would be fairly small. Calculating thermal losses
(in realistic settings) is way to complex for all but the experts.
Circuit losses can be calculated: unused_power = current^2 * resistance, where resistance
and current can be derived from your schematic, ohm's law, and part datasheets. With today's
electronics this can be considered neglible for most robots.
For example, a 6V battery rated at 2000mAh would have 43200 joules of energy.
Potential Energy
Potential energy is the energy 'stored' within an object 'at rest'. For example,
if you hold a rock in your hand, it has a potential energy of:
battery_energy / (mass * gravity) = maximum_height_possible
Kinetic Energy
Kinetic energy is the amount of energy required to accelerate/decelerate a robot.
energy = 1/2 * mass * velocity^2
energy = 1/2 * 1 kg * ( 1 m/s + 2 m/s)^2 * 2 = 18 Joules
Unified KE/PE
Now at any point in time your robot has some amount of both kinetic energy and potential energy.
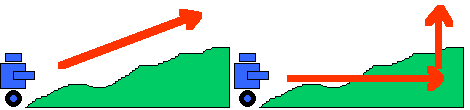
For simplicity, in this tutorial we will assume that horizontal motion requires kinetic energy and vertical motion
requires potential energy (see below image).
When summing this amount, we can then calculate how much energy your robot will require to
perform any task.
energy = mass * gravity * hill_height + 1/2 * mass * velocity^2 * 2
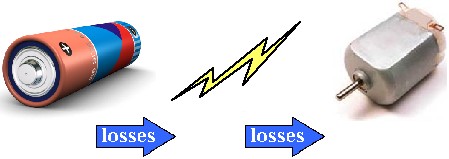
Energy Losses
The above examples only occur in ideal situations. In reality your robot will lose
energy from a great multitude of sources such as air friction, ground friction, gears, thermal losses,
circuit resistance losses, etc.
energy loss from friction = deceleration_ratio * distance_traveled * kinetic_energy
Battery Energy
I have been saying 'energy' for a while now, but how do you relate this number to
the energy stored in your robot battery?
power (watts) = voltage * current
joules = watts * seconds
Battery Energy = voltage * mAh (watt hours) * 60 * 60 / 1000


|
To better help you, check out the energy calculator to do the math for you. |
Addendum
A reader sent me this very informative email:
The Life cycle assessment that you offer compares WELL to wheel efficiency of Electrics to the TANK to wheel efficiency of combustion engines. To make this comparison fair, you really need to either start the electric comparison at the car's battery bank, or start the gasoline comparison at the refinery, and include the losses of transporting the fuel to filling stations via trucks that also use combustion fuels to move (equivalent to power line transmission/conversion losses in the electric life-cycle analysis). Some people even argue that a proper comparison starts the gasoline cycle at drilling for crude, but I think that would necessitate taking electric life cycle back to coal mining or uranium enrichment. :-)
Also, your assumption of 70% efficiency in the 2 conversions in a combustion engine (a 49% net efficiency) is a little ambitious. According to http://en.wikipedia.org/wiki/Fuel_efficiency, "Passenger car diesel engines have energy efficiency of up to 41% but more typically 30%, and petrol engines of up to 37.3%, but more typically 20%.". Figures from http://www.fueleconomy.gov/feg/atv.shtml suggest an even lower combustion system efficiency of 15%.
At any rate, these are common, but extremely large oversights when comparing the efficiencies of the two systems. I hope that you will consider revising your opinion and your article in light of this. I do want to thank you again for an otherwise informative and interesting website. Please keep up the good work.
Society of Robots copyright 2005-2014